Pneumatics and Hydraulics (MEC-120) Fall 2018
Professor Tim Callinan: [email protected]
Learn the basics of pneumatic, electro pneumatic and hydraulic control circuits in a complex mechatronic system. Master the functions and properties of control elements based upon physical principles, and the roles they play within the system. Use and interpret technical documentation and perform measurements on the pneumatic and hydraulic control circuits. Apply troubleshooting strategies to identify, localize and correct malfunctions and practice preventive maintenance and safety.
Professor Tim Callinan: [email protected]
Learn the basics of pneumatic, electro pneumatic and hydraulic control circuits in a complex mechatronic system. Master the functions and properties of control elements based upon physical principles, and the roles they play within the system. Use and interpret technical documentation and perform measurements on the pneumatic and hydraulic control circuits. Apply troubleshooting strategies to identify, localize and correct malfunctions and practice preventive maintenance and safety.
Class Assignments
Throughout the class we created systems using Festo Pneumatic kits. Using a program called "Fluidsim" to simulate majority of our systems before we created them. After using Fluidsim for a while, we converted our systems so they would run off of Fluidsim using a special board.
www.art-systems.de/www/site/en/fluidsim/
www.art-systems.de/www/site/en/fluidsim/
|
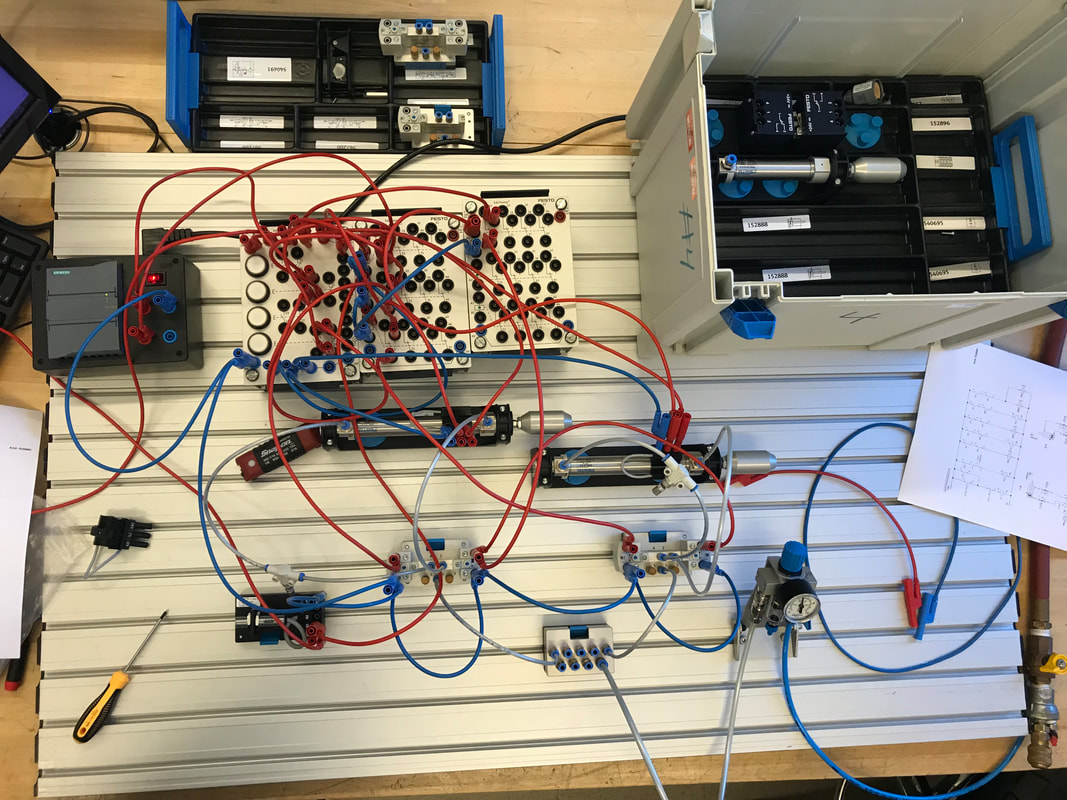
This was one of the first assignments we did, students were tasked to make a setup so when the cylinder touches the limit switch, it goes back immediately.
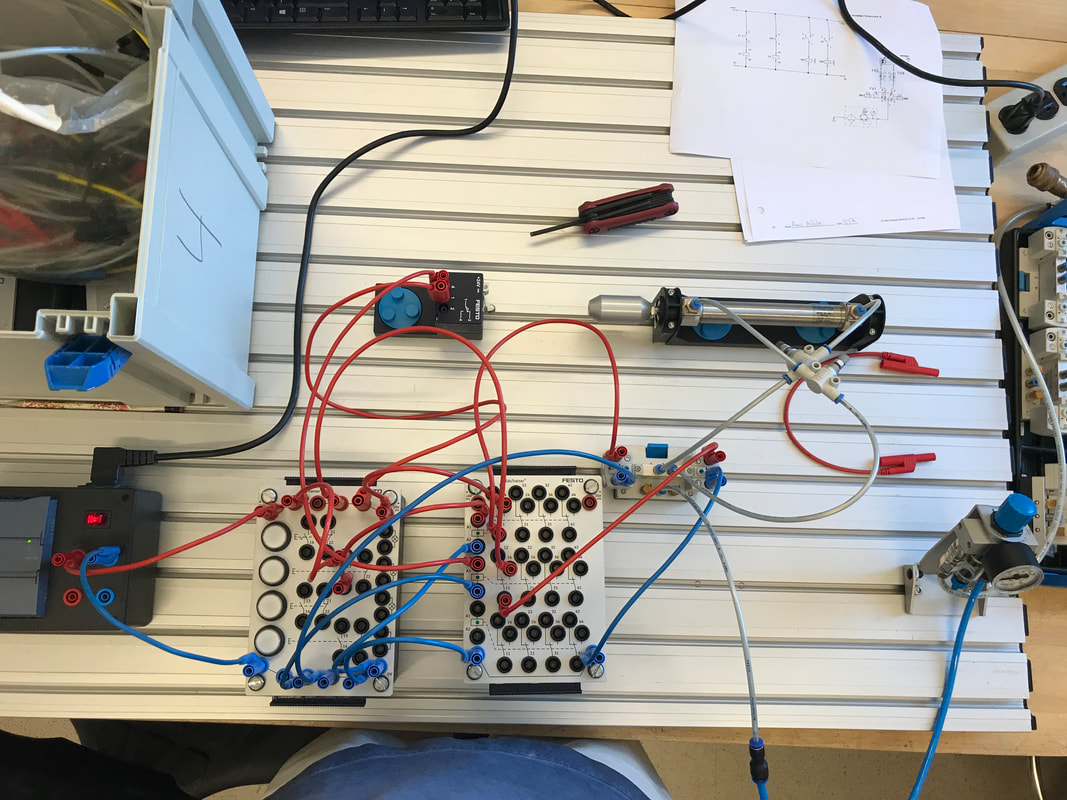
After learning how reed sensors work, students were tasked to have it so after you trigger an optical sensor, one cylinder extends out fully, then other will fully extend also, then after the second one fully extends, the cylinders retract.
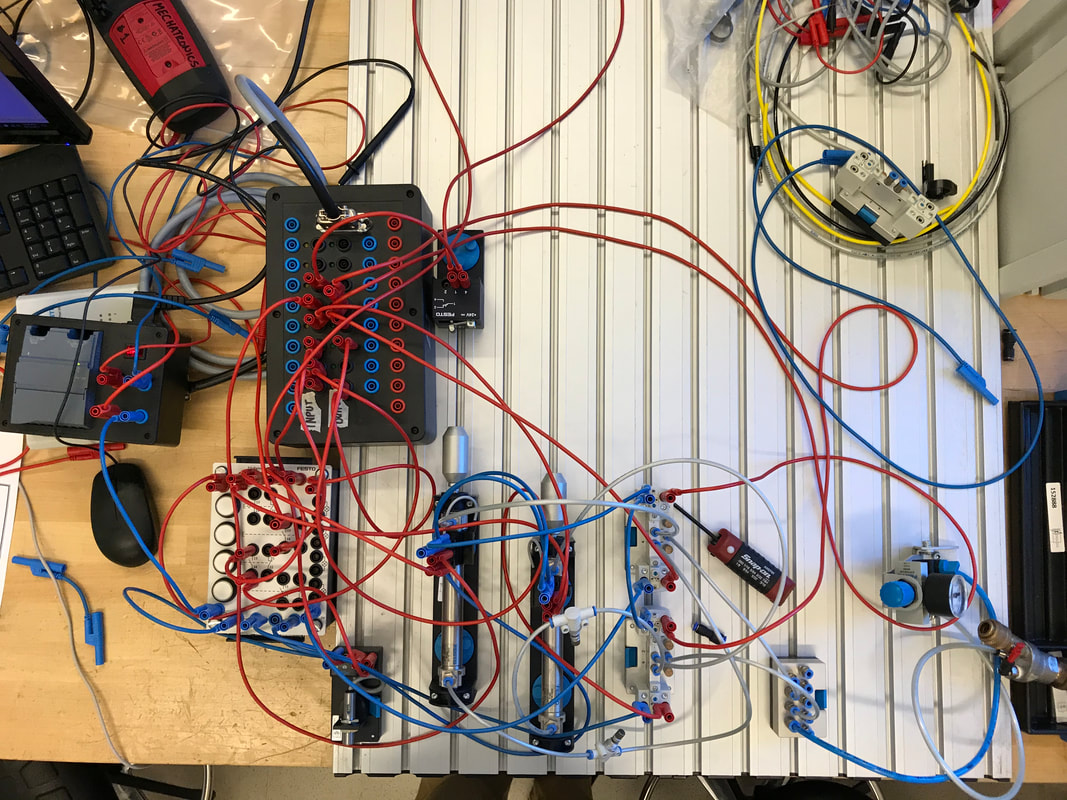
This is the same as the previous one except, it uses Fluidsim to run the whole program instead of it all being connected to a relay board and buttons. Notice the box large box, that controls everything. The buttons are used to start and then stop the program at anytime.
|
Final Project
For the final project, groups were tasked with creating a device pneumatic powered, to climb up a ladder. The robot had to be able to climb up the ladder completely autonomously after pressing the start button. We used VEX robotics parts for the base. Below are photos of parts and a video of my device. Please see the video for more information!
